
redis分区
分区是分割数据到多个Redis实例的处理过程,因此每个实例只保存key的一个子集。
分布式数据库首先要解决把整个数据集按照分区规则映射到多个节点的问题,即把数据集划分到多个节点上,每个节点负责整体数据的一个子集。
直观点看就是: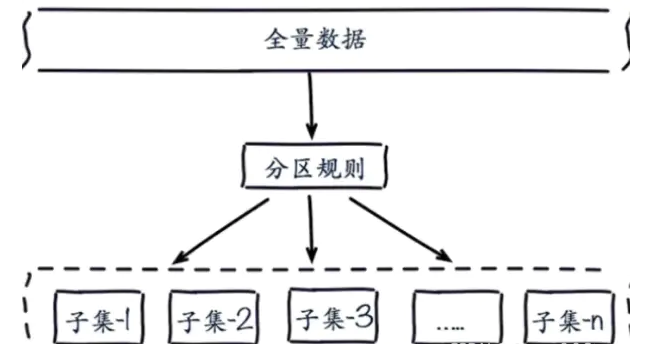
常见的数据分区规则有哈希分区和顺序分区
哈希分区:离散度好,与数据分布业务无关,无法顺序访问
顺序分区:离散度易倾斜,与数据分布业务相关,可以顺序访问
哈希分区方式:
1、节点取余分区
使用特定的数据,如Redis的键或用户ID,再根据节点数量N使用公式:hash(key)%N计算出哈希值,用来决定数据映射到哪一个节点上。这种方案存在一个问题:当节点数量变化时,如扩容或收缩节点,数据节点映射关系需要重新计算,会导致数据的重新迁移。这种方式的突出优点是简单性,常用于数据库的分库分表规则,一般采用预分区的方式,提前根据数据量规划好分区数,保证可支撑未来一段时间的数据量,再根据负载情况将表迁移到其他数据库中。扩容时通常采用翻倍扩容,避免数据映射全部被打乱导致全量迁移的情况。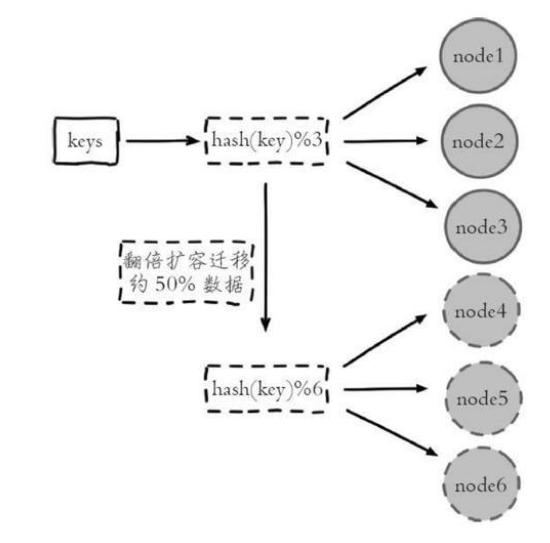
2、一致性哈希分区
一致性哈希分区(Distributed Hash Table)实现思路是为系统中每个节点分配一个token,范围一般在0~2 32 ,这些token构成一个哈希环。数据读写执行节点查找操作时,先根据key计算hash值,然后顺时针找到第一个大于等于该哈希值的token节点。如下图所示:
这种方式相比节点取余最大的好处在于加入和删除节点只影响哈希环中相邻的节点,对其他节点无影响。但一致性哈希分区存在几个问题:
- 加减节点会造成哈希环中部分数据无法命中,需要手动处理或者忽略这部分数据,因此一致性哈希常用于缓存场景。
- 当使用少量节点时,节点变化将大范围影响哈希环中数据映射,因此这种方式不适合少量数据节点的分布式方案。
- 普通的一致性哈希分区在增减节点时需要增加一倍或减去一半节点才能保证数据和负载的均衡。
3、虚拟槽分区
虚拟槽分区巧妙地使用了哈希空间,使用分散度良好的哈希函数把所有数据映射到一个固定范围的整数集合中,整数定义为槽(slot)。这个范围一般远远大于节点数,比如Redis Cluster槽范围是0~16383。槽是集群内数据管理和迁移的基本单位。采用大范围槽的主要目的是为了方便数据拆分和集群扩展。每个节点会负责一定数量的槽。
Redis数据分区
Redis Cluser采用虚拟槽分区,所有的键根据哈希函数映射到0~16383整数槽内,计算公式:slot=CRC16(key)&16383。每一个节点负责维护一部分槽以及槽所映射的键值数据。如下图所示: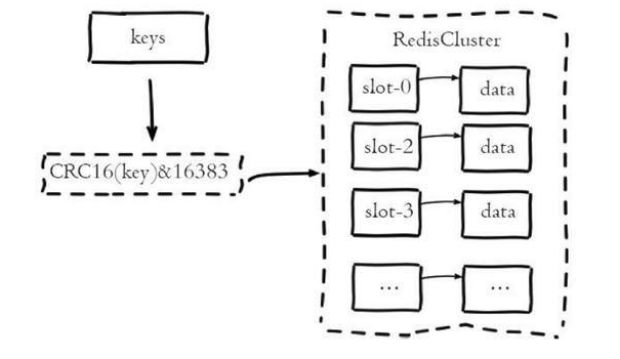
Redis虚拟槽分区的特点:
- 解耦数据和节点之间的关系,简化了节点扩容和收缩难度。
- 节点自身维护槽的映射关系,不需要客户端或者代理服务维护槽分区元数据。
- 支持节点、槽、键之间的映射查询,用于数据路由、在线伸缩等场景。
分区的优势:
- 通过利用多台计算机内存的和值,允许我们构造更大的数据库。
- 通过多核和多台计算机,允许我们扩展计算能力;通过多台计算机和网络适配器,允许我们扩展网络带宽。
分区的不足:
redis的一些特性在分区方面表现的不是很好:
- 涉及多个key的操作通常是不被支持的。举例来说,当两个set映射到不同的redis实例上时,你就不能对这两个set执行交集操作。
- 涉及多个key的redis事务不能使用。
- 当使用分区时,数据处理较为复杂,比如你需要处理多个rdb/aof文件,并且从多个实例和主机备份持久化文件。
- 增加或删除容量也比较复杂。redis集群大多数支持在运行时增加、删除节点的透明数据平衡的能力,但是类似于客户端分区、代理等其他系统则不支持这项特性。然而,一种叫做presharding的技术对此是有帮助的。